Machine vision, learning from examples, heuristic optimization
This project aims at providing efficient and cost effective solutions for the configuration of complex computer vision systems used for industrial production inspection. It is centered on the investigation, development and application of pattern recognition techniques based on learning from examples.
The studied inspection system, is intended for inspecting SOT packaged ICs. A specific task was considered: the inspection of the marking on the upper surface of such devices (fig.1).

Marking inspection is a binary decision process with either an acceptance or a rejection. At each new batch of packages to be inspected, a setup is required to prevent the occurrence of false acceptances and over rejections by the inspection system. Up to six parameters influence the marking inspection system’s behaviour. Until now they were set manually by a human operator at the beginning of each new production run.
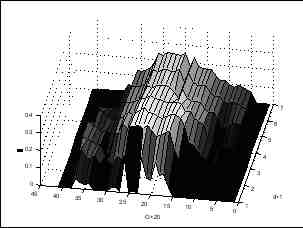
We investigated several heuristics to automatically set them, the goal being to minimize the probability of a misclassification. This minimization process takes the form of a function optimization over a multidimensional space (fig.2).
One evaluation concerns real production images and a setup including 4 parameters. The search methods used were :
• Stochastic Gradient Descent
• Random processes
• Genetic Algorithm
• Simulated Annealing
We wanted the methods to be both quick and robust. Genetic algorithm and simulated annealing appeared to be the best choices. With them, we managed to perform semi-automatically the parametric setup of a marking inspection system in only a few minutes. The solution found being nearly optimal according to the constraints imposed by the human operator.
 |
 |
| Fig.2 Partial view of the6D search space | Fig.3 Prototype configurator in operation |
A demonstrator was setup in our lab by integrating an X-Y placer and the inspection system (fig.3). It is able to automatically set up 6 parameters in order to accommodate for the changing inspected devices and lighting conditions in a couple of minutes.
Several methods to simplifying the usage of an inspection system were investigated. They were able to solve the related optimization problem. The system assists the human operator in its task to perform a teach at the start of a new production run.
O. Hüsser & H. Hügli, "A configuration assistant for versatile vision based inspection systems", Imaging 2000, SPIE Electronic Imaging Conference, San Diego, Feb 2000, SPIE Vol 3966-37, pp. 259-269
O. Hüsser & H. Hügli, "A configuration assistant for versatile vision based inspection systems", Journal of Electronic Imaging, January 2001, Volume 10, Issue 1, pp. 308-315
Olivier Hüsser & Heinz Hügli, "Search methods for a vision system configurator", 5th Int. Conf. on Quality Control by Artificial Vision, Le Creusot, France, 21-23 May 2001
O. Hüsser & H. Hügli, "Configuration assistant for vision-based inspection", SPIE's Electronic Imaging, Vol. 11, No. 1, Dec. 2000
hu / |