![]()
|
|
James Mure-Dubois, Thierry Zamofing, Heinz Hügli
Partners: (CTI 7719.1;3 ESPP-ES)
Computer vision, 3D vision, range images, time-of-flight camera, TOF, range image registration, scattering compensation, multi-camera systems, surveillance
Current video systems for people singularisation have weaknesses, and therefore can only be operated in controlled environments. Tri-dimensionnal vision is inherently immune to several of these weaknesses. Therefore, the goal of persPass project was to evaluate the relevance of new 3D vision technologies for demanding real-world applications including surveillance and people singularisation.
|
|
|
|
|
|
|
Figure 2: Color image. |
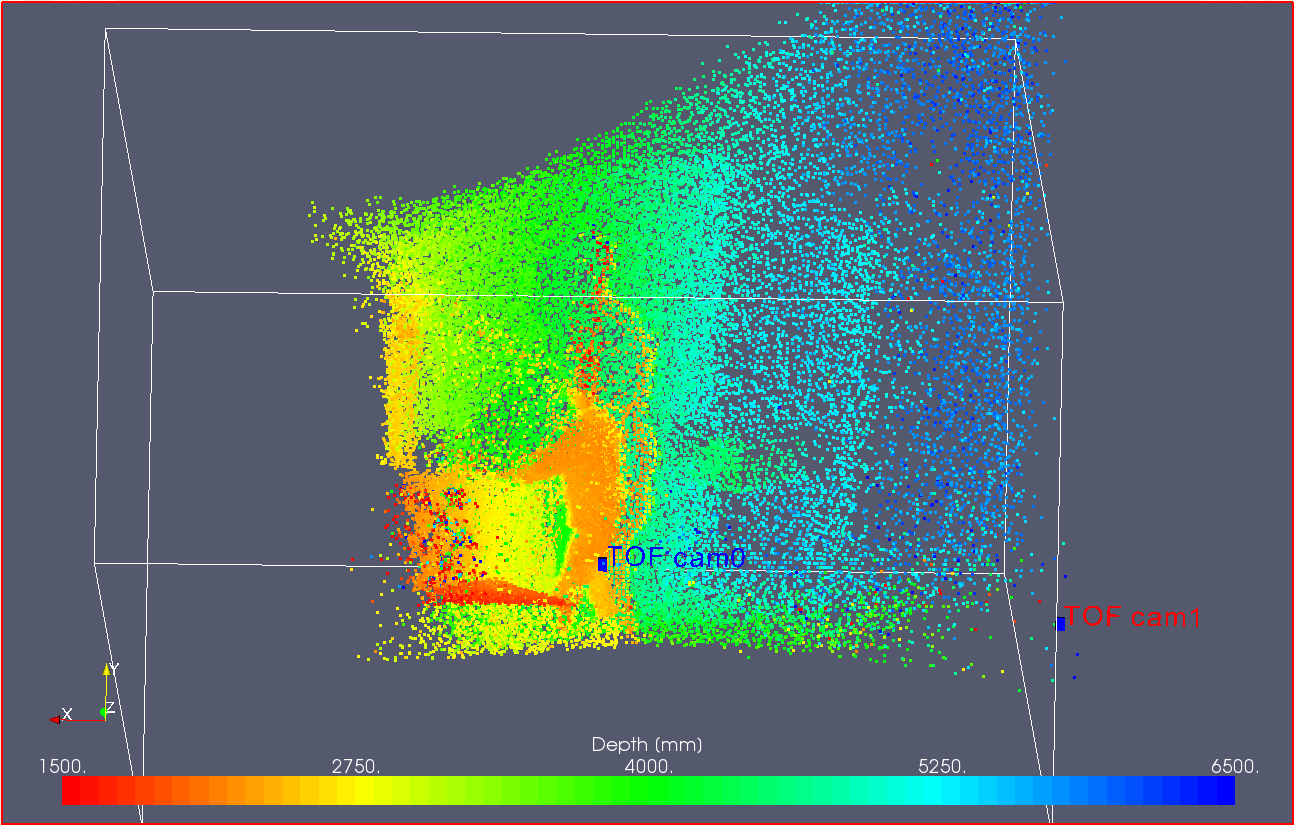
Figure 3: Point cloud for left TOF camera. |
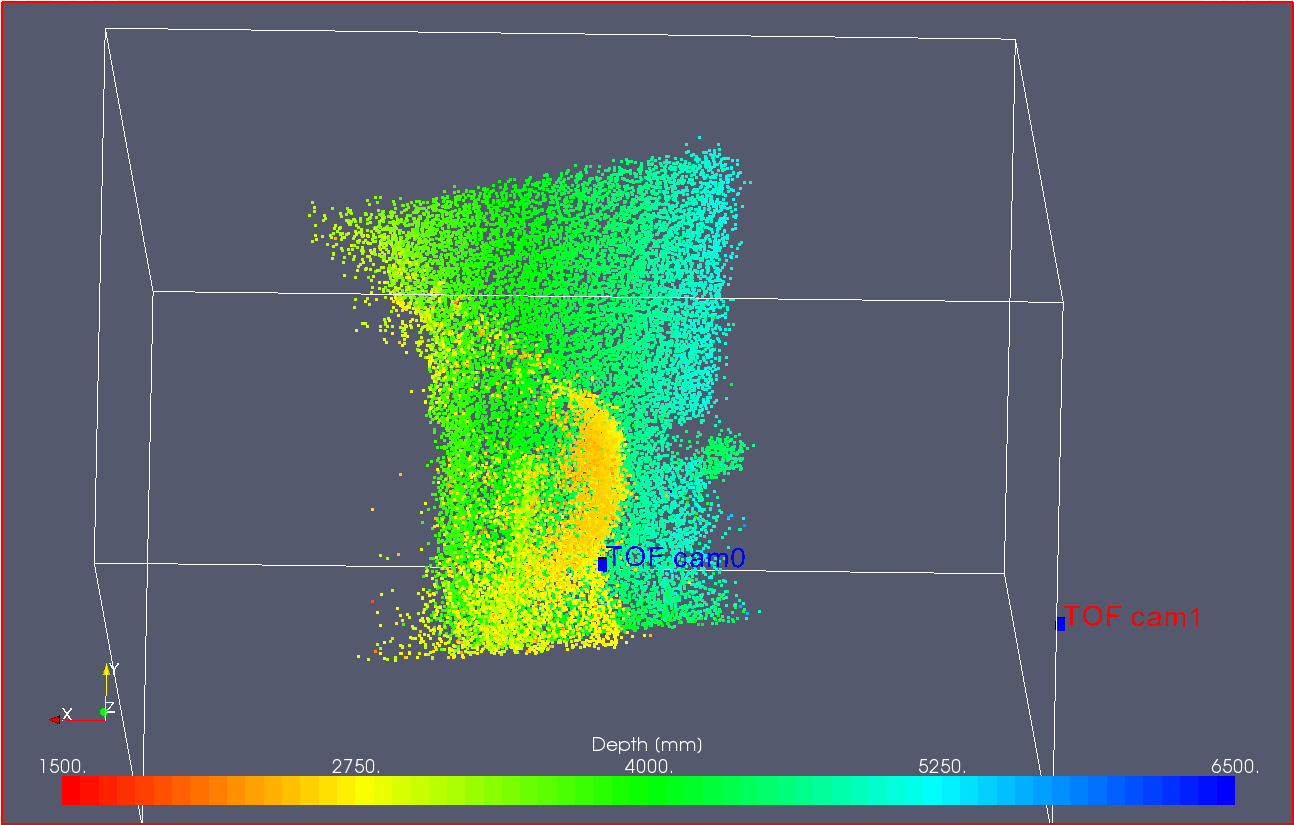
Figure 4: Point cloud for right TOF camera. |
Two 3D vision approaches were compared: stereo and time-of-flight imaging. For typical surveillance applications (indoor, with distances inferior to 8m), the TOF approach was selected. A prototype system for people singularisation was built using Swissranger(tm) cameras as sensors. Strategies for the combination of several sensors were studied.
The main results of the project were
A prototype people singularisation system was built.
Artifacts caused by light scattering in TOF cameras were identified as a problem to be solved prior to real-world deployment. A software filtering technique for reduction of scattering artifacts was designed, implemented, and tested.
Strategies for registration of multiple TOF range images were studied. An original approach was proposed, and found to have good performance for simple surveillance scenes.
The software products of the project are available as open-source at : http://code.google.com/p/wxsrparlab/.
[1] J.
Mure-Dubois, H. Hügli Merging TOF range images Proc.
SPIE Vol. 7066-22, 2008
![]()
[2] J. Mure-Dubois, H.
Hügli Automated inspection of microlens arrays Proc.
SPIE Vol. 7000, April, 2008
![]()
[3] J. Mure-Dubois, H.
Hügli Fusion of Time of Flight Camera Point Clouds Proc.
Workshop on Multi-camera and Multi-modal Sensor Fusion Algorithms and
Applications (M2SFA2), ECCV, Oct. 18, 2008
![]()
![]()
[4] J. Mure-Dubois, H.
Hügli Optimized scattering compensation for
time-of-flight camera Proc. Conf. Two- and Three-Dimensional
Methods for Inspection and Metrology V, Proc. SPIE Vol. 6762, 2007
![]()
![]()
[5] J. Mure-Dubois, H.
Hügli Time-of-flight imaging of indoor scenes with
scattering compensation Proc. Conf. Optical 3-D Measurement
Techniques, Zurich (to appear), 2007
![]()
![]()
[6] J. Mure-Dubois &
H. Hügli Real-time scattering compensation for
time-of-flight camera Proc. Workshop on Camera Calibration
Methods for Computer Vision Systems - CCMVS2007, Bielefeld
University, Germany, 2007
![]()
![]()
|
|
mu / 28.04.2008 |